PWM、PPM、PCM信号简介
03 March 2019
在航模入门时,在学习遥控和接收机时,经常看到PWM和PPM信号的说法。查了一些资料后,有了一个大概的了解。简单来说PWM(Pulse Width Modulation) 脉冲宽度调制, 这是一种通用的工业控制编码,PPM(Pulse Position Modulation),脉冲位置调制通过调制脉冲位置,可以达到传输多个PWM信号的目的。 PCM(Pulse Code Modulation)脉冲编码调制,这个本身是数字信号编码了。
PWM 调速原理
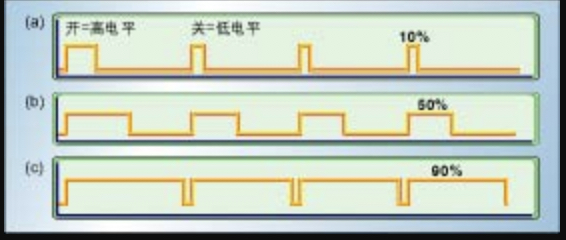
PWM是输出的电压是恒定的,通过调制脉冲信号的高电平宽度。来控制电机的速度,或舵机的行程。采用固定的频率,通过调整空占比,控制了输出的平均电压。
接收机的信号输出为3根引脚,上面一根是脉冲信号,中间是正电压,下面是地线。PWM是一种控制标准,无论有刷电机、无刷电机、舵机都是通过PWM信号控制。只是 电调的输出线不一样,有刷电机输出2根线,无刷电机输出3根线,舵机上直接用PWM信号。
PPM 合成多个PWM
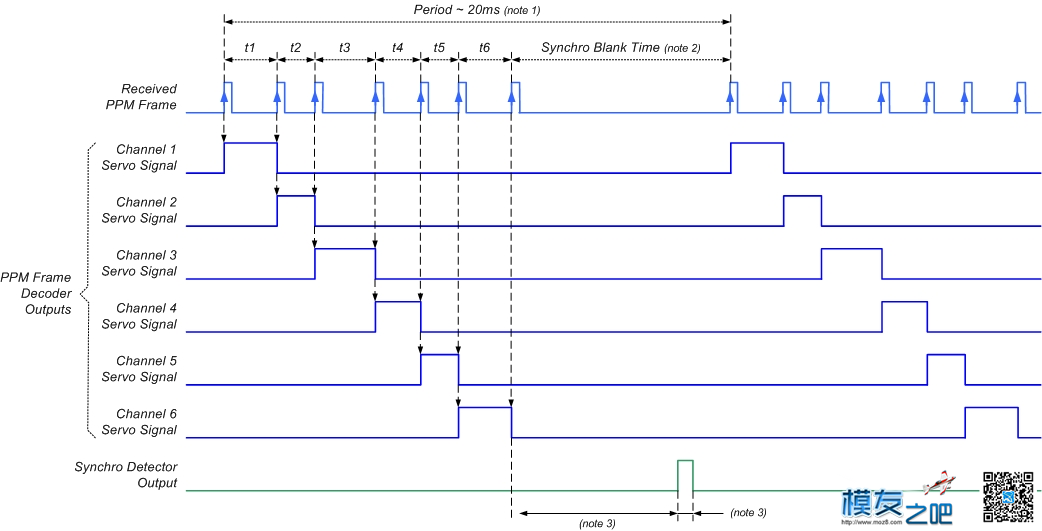
PPM可以理解为是PWM的调制标准,PPM信号不能直接控制舵机,需要解码成PWM后才能接到 电机&舵机上。PPM是最容易解码为PWM的一种编码方式,所以PPM也用于遥控发射器、到接收机之间到编码,PPM调制到高频2.4G上传输,这样接收机解码非常简单。 但是这种简单的调制容易信号干扰,所以现在遥控和接收机之间,采用根复杂的数字调制信号。只是在接收机侧,内部采用PPM编码。PPM现在基本上是遥控信号的标准了,一般的接收机都支持PPM信号输出。
其他调制信号
PPM是一种简单的调制、PCM、sbus、dsm等,都是PWM的编码协议,支持同一个连线下,传输多个PWM信号。越高级的编码方式越复杂。很多玩法是通过单片机(aduino)等来输出编码信号,通过解码后控制多个电机,实现飞控的目的。